|
| | YarpCamera (const std::string &port_prefix, const bool &network_bootstrap=false) |
| |
| | YarpCamera (const std::size_t &width, const std::size_t &height, const double &fx, const double &cx, const double &fy, const double &cy, const std::string &port_prefix, const bool &enable_camera_pose) |
| |
| | YarpCamera (const std::string &data_path, const std::size_t &width, const double &height, const double &fx, const double &cx, const double &fy, const double &cy) |
| |
| std::pair< bool, Eigen::Transform< double, 3, Eigen::Affine > > | pose (const bool &blocking) override |
| |
| std::pair< bool, cv::Mat > | rgb (const bool &blocking) override |
| |
| std::pair< bool, Eigen::MatrixXf > | depth (const bool &blocking) override |
| |
| std::pair< bool, double > | time_stamp_rgb () const override |
| |
| std::pair< bool, double > | time_stamp_depth () const override |
| |
| virtual bool | status () const |
| |
| virtual bool | reset () |
| |
| virtual std::pair< bool, Eigen::MatrixXd > | deprojection_matrix () const |
| |
| virtual std::pair< bool, RobotsIO::Camera::CameraParameters > | parameters () const |
| |
| virtual std::pair< bool, Eigen::MatrixXf > | depth (const bool &blocking)=0 |
| |
| virtual std::pair< bool, Eigen::MatrixXd > | point_cloud (const bool &blocking, const double &maximum_depth=std::numeric_limits< double >::infinity(), const bool &use_root_frame=false, const bool &enable_colors=false) |
| |
| virtual std::pair< bool, Eigen::Transform< double, 3, Eigen::Affine > > | pose (const bool &blocking)=0 |
| |
|
virtual std::pair< bool, cv::Mat > | rgb (const bool &blocking)=0 |
| |
| virtual std::pair< bool, double > | time_stamp_rgb () const |
| |
| virtual std::pair< bool, double > | time_stamp_depth () const |
| |
| virtual std::pair< bool, Eigen::VectorXd > | auxiliary_data (const bool &blocking) |
| |
| virtual std::size_t | auxiliary_data_size () const |
| |
| virtual std::int32_t | frame_index () const |
| |
| virtual bool | is_offline () const |
| |
| virtual bool | set_frame_index (const std::int32_t &index) |
| |
| virtual bool | step_frame () |
| |
| virtual bool | log_frame (const bool &log_depth=false) |
| |
| virtual bool | start_log (const std::string &path) |
| |
| virtual bool | stop_log () |
| |
| bool | is_probe (const std::string &name) const |
| |
| RobotsIO::Utils::Probe & | get_probe (const std::string &name) const |
| |
| void | set_probe (const std::string &name, std::unique_ptr< RobotsIO::Utils::Probe > probe) |
| |
|
| virtual bool | initialize () |
| |
| virtual bool | evaluate_deprojection_matrix () |
| |
| | Camera (const std::string &data_path, const std::size_t &width, const std::size_t &height, const double &fx, const double &cx, const double &fy, const double &cy) |
| |
| virtual std::pair< bool, Eigen::MatrixXf > | depth_offline () |
| |
| virtual std::pair< bool, Eigen::Transform< double, 3, Eigen::Affine > > | pose_offline () |
| |
| virtual std::pair< bool, cv::Mat > | rgb_offline () |
| |
| virtual std::pair< bool, double > | time_stamp_rgb_offline () const |
| |
| virtual std::pair< bool, double > | time_stamp_depth_offline () const |
| |
| virtual std::pair< bool, Eigen::VectorXd > | auxiliary_data_offline () |
| |
| std::string | compose_index (const std::size_t &index) |
| |
| virtual std::pair< bool, Eigen::MatrixXd > | load_data () |
| |
| bool | status_ = true |
| |
| RobotsIO::Camera::CameraParameters | parameters_ |
| |
| Eigen::MatrixXd | deprojection_matrix_ |
| |
| bool | deprojection_matrix_initialized_ = false |
| |
| RobotsIO::Camera::DatasetParameters | dataset_parameters_ |
| |
| const bool | offline_mode_ = false |
| |
| Eigen::MatrixXd | data_ |
| |
| std::int32_t | frame_index_ = -1 |
| |
| std::size_t | rgb_offset_ = 0 |
| |
| std::size_t | depth_offset_ = 0 |
| |
| std::size_t | number_frames_ |
| |
| std::ofstream | log_ |
| |
| std::string | log_path_ |
| |
| std::int32_t | log_index_ = 0 |
| |
| const std::string | log_name_ = "Camera" |
| |
| std::unordered_map< std::string, std::unique_ptr< RobotsIO::Utils::Probe > > | probes_ |
| |
| const std::string | log_name_ = "ProbeContainer" |
| |
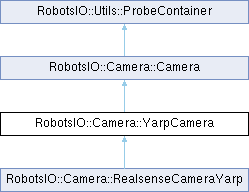
Definition at line 30 of file YarpCamera.h.
 Public Member Functions inherited from RobotsIO::Camera::Camera
Public Member Functions inherited from RobotsIO::Camera::Camera